I've learned a great deal about motors over the years. I don't doubt what they have here is real, as, these principles have been known for a long time.
The reason we don't use permanent-magnet synchronous motors like this in cars though, is because rare earth magnets are much more expensive, and more fragile, than using synchronous reluctance motors which are mostly iron.
The auto companies aren't dumb --if they thought PMS motors were cost effective, they would have been using them by now.
The car makers with any volume are using asynchronous AC motors (Leaf, Tesla) or PM DC synchronous motors (GM). Tesla got a lot of publicity when there was speculation about the Model 3 using a reluctance motor, which suggests it would have been a new thing. But it turns out to be a hybrid of PM and reluctance. Possibly Chinese vendors are doing something different for cars, but the e-bike and scooter motors are all PM.
I don't believe the company in the article have anything at the level they are claiming.
Right, look at the size of the motor versus the size of the batteries in an electric car. Efficiency is already well over 90%, too.
If you managed to create an idealized electric motor that was 100% efficient, had no limits on power, torque, or RPM, weighed nothing, took up no space, and cost nothing, it would be a nice improvement but I don't think even this would revolutionize electric cars. Batteries are the key.
Making something that performs well at freeway speeds, yet also is efficient when manuvering round a parking lot is hard.
Most companies just hope you don't care about only getting 5% efficiency round the parking lot, because that isn't a large fraction of your energy budget, even when it's so inefficient.
No idea! Would it be expected for an electric motor to lose so much efficiency in that scenario, though? I though the variation was small.
Motor efficiency aside, a total “energy spent for distance moved” accounting will look bad at such low speeds, just because the car has to power non-motor systems and they use energy at the same rate no matter how fast you’re moving. Peak efficiency in a Tesla is at around 25MPH.
I'm pretty sure large generators used hydrogen at one point. I seem to remember reading about them using a palladium membrane to purify the hydrogen used to cool generators.
According to people on the TMC forums (so take with a grain of salt) Tesla's motors only cost $350-400. If that's true, they're basically perfect already. It's the batteries which drive cost and weight.
Is that the Model 3 motors? I've heard that the Model S motors had a surprisingly high failure rate, many owners of the earlier models having had 5+ drive unit replacements. I'm guessing the Model 3 drive units are more reliable?
The early Model S motors had problems like that. They got a lot better over the years. The Model 3's is great, and the Model S/X front motors are now the same as the Model 3's, while the rear motors are something else that's still a lot better.
There’s usually a funny noise long before any catastrophic failure, so I think it’s the bearings or the gears, but concrete information is hard to find.
I actually had my motor replaced due to this noise. It was a high pitched whining, kind of like a jet engine spooling up. Not real loud, most noticeable in a parking garage with the roof open, and I wasn’t even sure if it was abnormal, but I took it in and they replaced it. It’s easy to swap out, so they just put in a new one and then fix the old one at their convenience and give it to the next victim.
Incidentally, I had another weird noise sometime later which was a distinct clunking sound when accelerating from a stop. That turned out to be a bolt that wasn’t tightened properly. Oops!
I am not sure why we are focused on the electric car angle. Assuming this motor design is legitimate and practical, I feel the implications for commercial/industrial prime movers and power generation are far more substantial. Hypothetically, if we were to replace all existing HVAC compressor and blower motors with this technology, where would that leave us in terms of power consumption reduction? How much wider do the applications become due to the variable speed capability of the motor design?
HVAC systems are far from theoretical peak efficiency. For example, notice how they all have a 'capilary tube' to restrict the flow of liquid coolant between the hot and cold sides of the system? That's like using your brake to go slowly round town rather than letting off he gas...
A small turbine rather than that capillary tube would instantly increase system efficiency...
Electric motors are already well over 90% efficient. I don't see what they could do to improve this. Maybe weight/power ratio? Even then, Tesla pretty much nailed it with his three phase "squirrel cage" motor. That's why even today that is what a Tesla car uses and it's what quadricopters use.
If you go distillate the actual claims from the fluff, the article is saying it has a larger torque to weight, smoother operation at low speeds, and larger efficiency at very high speeds.
And well, three is much to improve on the last two, so I'm willing to believe they got something for those, while I do expect the first claim to get completely lost once they actually produce the motor.
Cogging (non-smooth operation at low speeds) is pretty much a solved problem already. You simply program the cogging torques into the controller as a function of shaft angle, and tell it to compensate.
Final result: motor that behaves as if it had no cogging.
In the Fully Charged episode[1] linked in a recent thread here about some guy in Amsterdam making electric cars and boats, the guy mentions that the motors have brushes. I was mildly surprised as I just assumed they'd be brushless DC motors.
Are they just efficient enough that the cost/simplicity outweighs going brusless? Or are there other advantages to using brushed motors for electric vehicles?
Brushed motors are readily available in the appropriate sizes in small quantities and used. Brushless motors not so much yet. Then you also have to use the OEM inverter which will take some reverse engineering or bring your own inverter. People are doing this with car conversions, but it's early days and anyone can wire up a brushed motor.
Perhaps it’s simpler and more efficient speed control circuitry. For a DC motor you just need to step down the DC voltage from the batteries. For a brushless motor you basically need a variable frequency inverter that’s necessarily going to be more complex and possibly less efficient.
Yep, mainly. You still need basically the same circuitry, but 3x simpler- you only need one phase instead of three. However you still need the same PWM-type controller to do it. The single phase can operate at several times lower speed though, which makes the output devices and gate drive much cheaper.
Yeah; my old GMC had a carburetor and the fuel economy is the same as the current replacement, which is the same size, runs half the cylinders (unless it needs all 8) re-levels into aerodynamic mode at speed, and has shutters that close the radiator grill when possible. (The new one is fuel injected, etc).
I’m not sure what fuel injectors and electronic ignition got the industry, but it wasn’t real world fuel economy.
Oddly, even current year light hybrids are advertising similar fuel economy as the old truck. I’m guessing it isn’t a technical problem....
I'm also pretty sure the average sedan does 0-60 in the same time a 70's supercar. A BMW 330i can do it in 5.8 seconds. A Lamborghini Countach did that in between 5 and 6 depending on the model.
A Miura could do that in less than 7 seconds. And then would burst into flames ;-)
“I’m not sure what fuel injectors and electronic ignition got the industry, but it wasn’t real world fuel economy.”
Actually it is fuel economy. Your old truck [0] doesn’t have a bunch of mpg sapping emissions rules to deal with.
The fuel injector allow for more power for the same amount of fuel giving the engineer the power budget to spend on reducing non carbon emissions and increasing weight (ie safety)
[0] your truck appears to be tuned slightly lean, or at stoichiometry. Otherwise there’s no way you’d get similar mph.
On nearly any kind of coverage of an "amazing new innovation", the simplest sanity check you can do is check if they've filed a patent. If they haven't bothered, you'll be dead and buried before their work has any impact on your life.
Did I say I was against electric cars? I even prefaced that I want this to be real. The problem is, I smell a scam in what they're offering.
You, however, have placed your identity with electric cars to give yourself value. Because you lack personal value. A type of identity politics, if you will. How about gtfo your soapbox and realize that you just told someone who is interested in an electric car future as anti ev.
I'm not reacting to you or attempting to dis-engage your view point .. I'm just saying, when electric is done properly and you use it as a daily, it really, really rocks. This may, or may not .. be an outlier to your point of view.
But truly, done properly, the end of ICE seems quite plausible.
-Nothing in the article or video says they have actually built prototypes.
-They say it can be built without rare earth elements, but say nothing about how that affects performance. Everything else is for the magnet version and they use more magnets than is normal.
It's not a real demo though, in my opinion. If it was already in a car or used to power a lathe or something tangible, that to me is a prototype. Even a toy car is fine by me. In the video we can guess it's a prototype of a functioning motor. I guess. But let's be honest, there are prototypes for perpetual machines.
A prototype has to be real world functional. Doesn't have to be perfect or clean looking, sleek, etc. Just proves it can do a real world function. If it can't do anything useless yet, it's just a lab experiment or wishful thinking.
How cooling of rotor being achieved ? Energy, power and torque density of other motor designs are limited by their cooling capacity. Reluctance motor being externally cooled, has this as a prime selling point. I think for claimed improvement, it will need external cooling which is not mentioned in article.
There's a lot not mentioned. How do they move the rotor magnets in field weakening? How do they reconfigure the coils? How do they get 20 percent more efficiency when most are already over 90-95 percent?
Not that it’s what’s going on here, but as an aside: it’s possible to get over 100% efficiency, so long as you can take from the environment to achieve it. Reverse-cycle air conditioners routinely get 300–400% efficiency when heating, because they’re moving heat that already exists, rather than generating new heat.
As a layman, how it sounds to me is that your 90–95% figure is the optimal efficiency, but electric cars don’t spend most of their time driving their motors at the speeds that yield this optimal efficiency; this motor, then, has a wider range of speeds at which it can be optimal. They’re also taking reduced weight into account. Hence talking about all this in terms of range rather than electrical efficiency.
They probably mean something along the lines of a 20% reduction in losses. Or, they're comparing at an operating point that is far from peak efficiency. Motors can have 70% or lower efficiency when running at low speeds.
If efficiency is 90%, then 10% is waste; cut that by 20%, and your motor efficiency is now 92%. Something like that. There's a lot of ways they can arrange the math, not to mention it's not clear which motor they're comparing to, which makes this kind of claim very vague. They should just state the efficiency they get.
One picture clearly shows a cooling jacket, and the renders look like liquid could flow into the stator the same way the wires do.
Having an outrunner configuration for this motor makes very little sense. It's hard to cool and power, and magnets are generally powerful enough to produce excess flux in the iron. Their field weakening would also work better with an inrunner since you could do it entirely electronically, and it would be easier to manufacture.
An electric motor is drastically more efficient than an internal combustion engine and so produces much less heat, but it's more difficult to get the heat out of the motor. You don't need a big radiator with lots of airflow to cool an electric motor, but you do need an intelligently designed heat exchanger in the motor unit.
They still have intakes and radiators, maybe just not quite as large. Plus it seems to be stylish to put giant grilles and even fake vents on some cars nowadays.
Here's a great video showing the Chevy Bolt's cooling and heating systems:
A brief history of the evolution of designs of electric motor from the beginning to the electric motor as we know it today be by Professor Eric Laithwaite:
The video shows a picture of a motor about 99% similar to that of Cascadia Motion [1] based on the external appearance and cooling apparatus and not at all similar to the picture in the article.
There are a number of goofy marketing-wank sections on there. Written by an engineer, but it's got the ring of someone really stretching to sound innovative.
> As much as 30% of the typical copper needed is reduced by having all the copper in the coil involved in energy conversion.
That's total bullshit. Here's what they're saying: in a typical motor, at least some of the copper will be outside the iron[1]. There's waste associated with that, since you only need current to be flowing exactly around the iron. However, 30% is an order of magnitude high. The stray field from that copper is almost nil, as it will massively prefer to travel through the iron, so the only real worry is that you've just got extra copper. In modern motors the windings are quite tight to the iron and the stator is long axially.
Even in poorly-wound stubby motors like those in ceiling fans[2] you won't be wasting 30%- maybe 10%. The part of the loop going side-to-side is not wasted, only the parts extending up and down away from the iron.
> The structure of the HET ensures that all of the magnetic field interactions are fully involved in the production of torque.
They must have a gap to get in wiring to the stator, so field can escape there. It also goes straight through the magnets. Any gap develops fringing loss essentially regardless of how big it is, so their reduction in loss is small. And stray field loss is already so tiny it can be neglected.
> The unique design requires no unproductive open spaces. Only the air gap surrounding the coil is left open.
And I wonder how tight their air gap actually is, with all those cantilevered magnets and moving parts. Probably not great. Plus, there's a ton of empty space inside the rotor. They do use the stator iron slightly more efficiently, but in normal motors that space is usually used for bolts anyway.
> Unlike existing conventional machines where torque is only present at an optimum point as it approaches a magnetic pole, the HET has no single optimum point but rather all positions exhibit maximum torque.
> The torque and force will exist while the coil is in the tunnel, regardless of tunnel length.
Well that's just blatantly not true, and also the crossover point between poles is going to be very wiggly indeed. The stator is going to be stretching and compressing itself at different points and the flux has to travel from pole to pole regardless of how many coils are in the way. Their design lets them trade off between torque and speed more easily, but all the rest is nonsense.
> Another advantage is that phases can be software controlled to be grouped into particular patterns. For example, phases A and B can be controlled to act as a single larger pole. Likewise, C, D, E and F. Conversely other groupings are possible with A, B, and C or D, E and F acting as single poles.
Any high-slot motor can be run like this. It's very rarely done because the cost of adding more phases is immensely high. Doubling the number of phases can be multiple times more expensive than doubling the power. And for variable three-phase motor systems the driver is already the most expensive part. If they need all those coils, that's a big problem. TBH though this bit is probably what won them investors- people may be interested in applying their simulation and controls work to conventional motors. It would be deeply challenging to add more slots to the current gold standard motor (PM-reluctance), but it could potentially lead to more high-end efficiency.
> In both of the above cases there is a radical drop in efficiency. The HET Motor addresses this need in a completely different manner. By slightly rotating a single side rotor, an axial magnetic component is introduced. This weakens, as far as the coils are concerned, the total magnetic field experienced by the coils. The degree of field weakening controls the tradeoff between torque and speed.
> For the first time in electric machine history, as the HET Motor enters the Constant Horsepower Region, core losses drop and overall efficiencies actually climb!
Hmm. Yeah, I could believe it. They're also introducing slew, but that's not terrible. It also makes it easier on the driver. However, this would be ungodly expensive.
Electric cars don't usually have "gearboxes" proper. They use gears, fixed ratio reductors. This is not expensive nor is it fragile nor bulky nor inefficient.
The benefits that a very high torque motor could bring are real but marginal, a few percentage points improvements on the respective metrics. They could instantly be negated by, say, the lower initial reliability of a revolutionary design.
I am genuinely curious, why aren't there transmissions for electric engines? Surely the advantage would be the same as for an IC engine. I remember hearing that Tesla tried to build a 2 speed transmission for their Roadster back in the day, but apparently it kept breaking, so they stuck with no transmission.
Are there transmissions out there for EVs, and I just haven't been paying attention? And if no, why is it so hard? Is it because of the torque?
> Surely the advantage would be the same as for an IC engine.
No. The two types of motor are fundamentally different.
Combustion engines need transmissions because they produce relatively constant torque (within 50% of max torque). Electric motors on the other hand produce relatively constant power.
This makes total sense when you think about it. An IC engine is powered by explosions; every explosion produces roughly the same force on the piston regardless of speed. You can't get more power without more explosions because you can't cram more air in the cylinder. You can only speed up the engine.
In an electric motor, you can cram as many electrons into the wires as you want. You are only limited by how much heat is generated. Increasing speed increases heat slower than increasing torque, but you can still basically increase either as much as you want.
> Electric motors on the other hand produce relatively constant power.
Generally speaking, no. P = 2piM*n, while the common types of motor used in electric drives (synchronous and asynchronous three phase machines) will produce nominal torque at (almost) any speed from 0 (not for asynchronous machines) to nominal speed; therefore output power is pretty much proportional to speed.
The only type of motor that comes to mind that has somewhat of a constant-power behaviour to it are series wound motors.
What you're describing[1] is only true for fixed-voltage controllers. With a real driver, all motors will behave as I described, even induction motors[2]. The only caveat is that due to saturation and hysteresis there are obvious nonlinear regions where speed or torque can't be increased. Between those two regions, all motors are capable of constant power output. Air-core motors are in theory more ideal, but good luck getting them to behave.
In fact, it's a fundamental property of motors- the power constant. There is a torque constant (rpm/volt), a torque constant (torque/amp) and a motor constant that describes the efficiency of transformation from electrical to mechanical power.
You seem to misunderstand. Let's talk about an 15 kW asynchronous machine with two poles hooked up to a VFD. At nominal voltage (say 400 V) and nominal frequency (say 50 Hz) it will produce approx 50 Nm of torque to reach its nominal power (n ~ 2900 min^-1). Input current will be somewhere around 30 A. Let's say we want it to run at approx 300 min^-1, thus frequency is reduced to ~5 Hz and voltage to ~40 V. Output torque will still reach approx 50 Nm at the same current as it did at 50 Hz. However, output power is now approximately 1.5 kW. You can boost low-end torque a little bit, but not by much (every VFD offers some parameters for this), because this requires increasing the current.
If we were to run this motor "constant power" at 300 min^-1 it would provide about 500 N*m of torque and run at a hypothetical current of 300 A -- it's quite clear that that isn't going to go well.
Sure, there are lots of ways you can make a motor that will mess that up. You can put in current-limiting fuses. Many motors cool themselves with fans, so they can dissipate lots of heat at speed and will just burn up if you try to add torque. You can make windings with insulation that breaks down at low voltage so the motor can't spin fast.
For big stationary motors that are wound for high voltage, the large number of turns means copper losses dominate and limit torque at all but the highest speeds. Nevertheless, those motors can be rewound for lower resistance, which will cause them to have more even tradeoffs at different voltages/currents. Rewinding a squirrel cage rotor is... a bit of a task, obviously, but the torque/voltage constants are always pretty interchangeable.
Afaic the upcoming Porsche Taycan has a two speed transmission. In the Taycan it's used for more efficiency at >160 kph or so something an American car really doesn't need and it costs them a slower 0-100 kph. Tesla uses another trick to get better acceleration to 100 kph. They have two motors and one is geared for high efficiency at US highway cruising speeds (so ca 120 kph).
In general electric motors have a very wide band of excellent efficiency and an even wider band of great efficiency and they are orders of magnitude more efficient than ICE in any part of their operational torgue/speed range.
Some ICE vehicles don't have a transmission! The most important reason for ICE engines to have multiple gears is low speed operation and moving from a stopped position.
First - ICE engines have a minimum running speed, usually between 650-800 rpm. Driving in a gear that runs the engine slower than this can cause the engine to stop running or damage it. The vehicle needs to be able to operate at low speeds, which requires a low gear ratio. Operating at high speeds requires a higher gear ratio so the engine isn't damaged from running at extremely high rpm (efficiency is also an important factor, but secondary).
Second - Motor vehicles with ICE engines (ignoring hybrid assist features) need to be able to move away from a stop with the engine running, and without allowing the engine rpm to drop below idle. This requires a clutch mechanism to disconnnect the running engine from the rest of the drivetrain, and to slip as the vehicle's speed rises to a point where it's safe to lock the engine's rotation speed to the drivetrain's rotation speed. Manual transmissions come with manually operated clutches, newer automatics have automatically operated clutches, and old automatics have a hydraulical coupler that slips at low engine speeds.
Massive vehicles have an extremely low first gear, so they can get going from a stop. Passenger vehicles have a first gear low enough to operate in places like a parking lot. Top fuel drag cars only have one speed; a massive clutch controls engine power transfer to the wheels.
Electric motor vehicles don't have the low speed operation problems that ICE cars have, or anywhere near the level of inertial wear and cacaphony at high rpm, so the transmission can be optional. Transmissions are expensive, and a vehicle in the EV market in its current state doesn't need that level of optimization to be competitive.
EVs don't usually have a transmissions unless they were converted from a gas car. Electric motors don't stall and generally have a much wider RPM range where they're usable and efficient.
I think most people with conversions just drive around in 2nd gear or thereabouts most of the time. Transmissions are a nice-to-have feature though, especially if your motor isn't particularly powerful and isn't made to run at extreme RPMs.
Electric motors don't stall like an ICE, they produce much of their torque even at 0 rpm and usually operate over a wider rpm range.
A Tesla for instance has an electric motor that goes up to 18,000 rpm with a roughly 10:1 reduction gearbox for 0-155mph speed range without shifting any gears.
We have many gears for better efficiency with ICE, because every ICE has very narrow areas of RPM×torque that give you acceptable efficiency (typically those with high mean effective pressure). You could totally get away with three gears and still get to 150 km/h, it's just that it will be a lot less efficient.
Electric motors don't have this particular problem, and they don't need a start gear that is a lot shorter than the other gears (1st to 2nd is usually around a factor two, while from 2nd up to the next higher gear the ratio will change by perhaps 30 % or so) because they can deliver nominal torque at low speeds or from zero speed (so they don't need a clutch, either). An ICE can't do that.
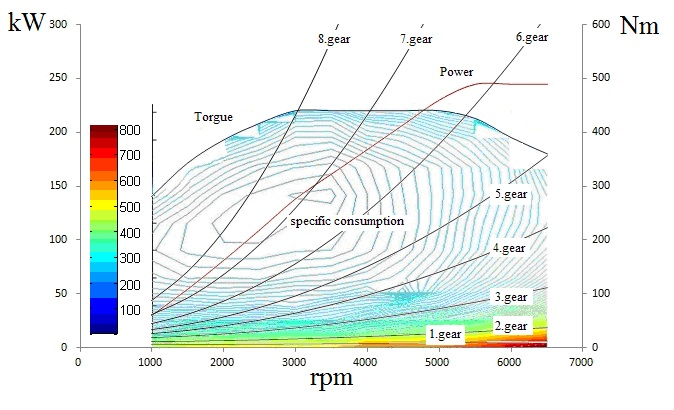
Here are the transmission ratios of a random six speed transmission:
> every ICE has very narrow areas of RPM×torque that give you acceptable efficiency (typically those with high mean effective pressure). You could totally get away with three gears and still get to 150 km/h, it's just that it will be a lot less efficient.
It isn't that narrow[2]. Engines with fewer gears aren't particularly less efficient, they're just MUCH slower. Look at a map of gears[2]: the top gears are in the efficient range, but the lower gears are only there to allow you to rev the engine high while accelerating. In the ratios you gave, you could cut out 1, 3, 4 and only use gears 2, 5 and 6 and be able to get around fine- you start in second and then shift up as soon as you're rolling. You'd have a much more efficient car but you'd be incredibly slow.
You could get around fine with the first three gears, it's just that it would be a lot less efficient.
You could get around fine with 2, 4, 6, it's just that it would have very slow and less efficient acceleration (accelerating for longer at low RPM and very high torque is overall less efficient than accelerating for a shorter period of time at a higher RPM, given identical start and end speeds).
And that's exactly the point I made. You need many gears for an ICE because being able to reach a given speed in a given gear says very little on how efficient that is, therefore you need different gears for accelerating versus holding a given speed to get acceptable efficiency.
> (accelerating for longer at low RPM and very high torque is overall less efficient than accelerating for a shorter period of time at a higher RPM, given identical start and end speeds).
Meanwhile, I logically built on the same point to present a contrarian opinion, so your initial reply is somewhat pointless nitpicking. It's exactly what the author of the article intended, making a passing reference to the fundamental flaw thet invalidates the rest of the hype contained. It's not even a conspiracy, it's standard clickbaity journalism, a balanced article about a possible 3% efficiency boost would not make it to HN front-page.
I think that those "95% efficient" motors are not 95% efficient at all speeds and loads. From what I can grasp, the variable configuration of the rotors let's them trade speed and torque without any loss in efficiency by changing the energizing patterns in the controller. The reduction gearbox is pretty simple in design but it adds one extra component to fail, and it adds weight.
I'm curious to see if they can make the controller simple (cheap, reliable, efficient) - that seems to be the next immediate challenge.
Cool project for sure, the patents have a fair bit of good information on them. They also have a functioning prototype which is good for a company at this stage. See 60 seconds in here: https://youtu.be/yqIKZGx-06Y
I think waiting two years to get them into a car is a bit of a miss in terms of roadmap.
> The HET is a three-dimensional, circumferential flux, exterior
> permanent magnet electric motor with some interesting
> characteristics. For starters, it runs four rotors where other motors
> typically run one or two. The stator is fully encapsulated in a four
> sided "magnetic torque tunnel," each side having the same polarity,
> ensuring that all magnetic fields are in the direction of motion, and
> there are no unused ends on the copper coils wasting energy. All
> magnetism the system creates is thus used to create motion, and all
> four sides of the stator contribute torque to the output.
I'm not so sure about the idea that "unused ends" are "wasting energy". Simply put your finger on a small spinning motor and watch the current go up - increase the work done, increase the power usage. Typical losses in magnetic motors are:
1. Friction - Bearings, brushes, etc
2. Air - Typically cooling
3. Core - Hysteresis (changing polarity is not possible instantly) and eddy current losses (unwanted current flow)
4. Resistance - The coils themselves resist high current
Brushless motors are typically 85-90% efficient and brushed typically reach 75-80% efficiency [1]. Reducing the size a little, sure, but increasing the torque - I highly doubt for the same power input. I'm sure we will get to 95% efficiency within the next 10 years or so (with big money from the automotive industry pushing research), but it's highly unlikely we will get more than that outside of the a lab with super-cooled conductors.
Which is the other thing, increasing the amount of torque and reducing the size means greater heat generation. Any saving in size you're getting gets lost again just keeping the motor cool.
Anyway, the promises don't pass basic scrutiny, I would definitely need to see some numbers on this. It sounds like snake oil.
EDIT: Another thing - electric motors are already very efficient, you're getting more loss in other parts, such as voltage regulators, motor control circuitry, batteries (if you're using them), cooling, etc, etc. I just don't think this will translate to a massive improvement.
I'm a total novice to electric motor design, but they mention being able to switch between simulating phases. I don't think they mean they do higher torque at lower power input. I think it means that they can transparently trade efficiency for higher torque, so they can be efficient at low torque, high speed, while also be able to deliver torque at low speed without requiring gearing.
I know how marketing departments work, if you have a product that has only one advantage over the competition, then they'll go and market your product as if it's the best at every point. I bet they've come up with this design that eliminates the need for gearing while retaining efficiency at low torque, and the rest is just marketing jabber.
I'm a lay person somewhat familiar with the terminology. I am going to be wrong on several details.
What they were talking about is phase weakening.
Think of voltage as 'electrical pressure'. Like PSI or Bar.
Think of amperage as 'volume per second' or 'amount of electrons (equivalent charge) per second'... like liters per minute.
Combine the volume per second by pressure and you get total energy per second; watts. Hence 'voltage * amps = watts'
Electric motors are also generators. When they spin they create their own 'reverse voltage', sometimes called 'Back EMF', that creates resistance in the windings of the motor.
The faster the motor spins the greater this 'back emf'. It'll increase until the 'back emf' creates enough resistance that it effectively negates the voltage coming from the power source. At that point the motor has reached it's top speed. This is why DC motors don't try to spin infinitely fast.
The strength of the motor, the torque, is directly related to the amount of amperage flowing. When the motor is at it's top speed it's generating only enough torque to overcome the resistance of the bearings and other parasitic drag. So very little actual current is flowing, especially in a very efficient motor.
Field weakening is a technique that you can use to overcome some of this limitation.
What it does is change the shape of the voltage wave. Most of the time on a oscilloscope it would show up as a sine wave or trapezoid... But if you can change the timing and peak of the wave then you can effectively weaken the magnetic field at the right time that the 'back emf' isn't as strong. Sort of flatten out the peak and make the pulse wider then it normally would be.
So you end up flowing less peak amperage, but overall more amperage. Depending on the type of motor and speed the amount of extra torque/amperage you can generate can be very significant. The trade off is reduced efficiency.
A simple motor surface mount magnet may only see a 20-30% increase in top speed and decrease in torque at the low end. A more modern interior mounted magnet (were magnets are embedded inside of steel laminates) that combines the strength of the rare earth magnets with reluctance of the magnetic field flowing through the steel.. (think of the magnets providing their own force at low end and then providing a guiding path for magnetic flux as the motor speeds up) Can see many multiples boost in top speed while still maintaining significant torque at low end. Field weakening on some motors can produce increased torque across the entire RPM range.
This is going to be very strongly taken advantage of in EVs like the Tesla Model 3.
Although in the case of most motors this field weakening is done electronically, by changing the shape of the waves sent to the motor.
This design does the same thing, but by moving the drum's magnets out of phase with the magnets on either side. So it's mechanical field weakening.
It's not a super-new concept or anything. I expect their patents have to do with the 'H' shape of the spindle and the math behind how it is supposed to work.
I don't know if mechanical field weakening really provides any real benefit over electronically controlled one.
Very interesting, thank you! Do you have more information I can read about phase weakening and BLDC control algorithms?
I ask because I happen to be designing a BLDC motor controller, I am aware of using the back EMF to measure the motor phase, but never considered it as a force slowing the motor down. As a software engineer by trade I was hoping I could perhaps dynamically switch between the two control techniques to get low-end torque and high-end speed? I was also hoping to setup the controller to optimize the various parameters for the specific motor it is controlling by measuring the back EMF.
Check out endless-sphere.com. There are people there doin home-built motors and designing controllers. 99% of the content is just people messing around with their bicycles or arguing over silly things, but there are a few very highly technical people.
Also there is a open source motor controller called VESC from Vedder Electronics.
It's a modern controller with FOC modes and such things.
Originally designed for electric skateboards it has gone through many revisions and is a viable commercial product. The developer has a official vendor for buying the design, but there are many clones and variations of different prices and quality.
There are people on endless-sphere working on variations to scale it up for larger EVs.
I agree about the article, I just want to mention that improving motor efficiency would also help with some of the other losses you mention. Going from 80% to 90% means that you need half as much cooling, batteries may be more efficient when you draw less power from them, etc. That might it worth it even if the motor efficiency gain alone doesn’t look like much on paper.
> Going from 80% to 90% means that you need half as much
> cooling
At the very most this will be < 5% performance increase because they'll need to match the best of BLDC (~90%) and 100% is simply impossible as there are losses that cannot be engineered out (thanks Physics). Also that 80% -> 90% isn't all heat, I imagine the amount of cooling required to stay roughly the same.
> batteries may be more efficient when you draw less power
> from them, etc.
From memory, a switch mode power supply is one of the most efficient at about 90% - but you really have to design it well to get that kind of efficiency [1]. The batteries were a soft point for cars. But there's quite a bit of efficiency to get from phase control algorithms which would be in the motor control circuit.
> I just want to mention that improving motor efficiency would also help with some of the other losses you mention.
It's not that simple. Increases in torque are strongly associated with increases in current- torque is directly proportional to total magnetic flux, so more torque in a smaller package generally means more current in your wires. The alternative is to add more turns of thinner wire, but thinner wire has lower packing efficiency.
Losses from current rise as RI^2 in simple wires, slightly faster in transistors, and some very complex factor in batteries that I can't remember but is between I^3 and I^4. You can make a 100% efficient motor, but if it quadruples the current draw then it will be almost useless for vehicles.
That single reduction at the motor is not very important. Remember that there are many more gears in the car besides just the drive reduction! There's one gear mesh (spot where two gears meet) in that reduction, then five per differential, of which there are two in 4wd vehicles. Even more importantly there are also eight CV joints[1] which have higher losses than gears, plus dozens of bearings and elastic losses in the wheels. The losses of the motor reduction are small compared to everything else.
Also, a single stage spur or helical reduction has ~99% efficiency[2]. It's not at all like a full transmission[3], which has a ton of parts that are always spinning and churning oil, plus sliding friction. The reduction on an electric motor uses a more efficient grease and does not churn oil. Fun fact- greases (mixes of soap and oil, normally silicone oils) are non-newtonian fluids. They're shear-thinning, like ketchup, and have much lower friction under pressure while still sticking in place, unlike oil. Amazingly sophisticated for something that has existed for centuries!
Anyway, what I'm saying in the above post is that even if the efficiency is much higher, even counting the gearing, it does not necessarily lead to higher efficiency elsewhere in the car. If this motor gives 20% improvement on an 85% efficient motor+gearset, that's only a 3.4% decrease (85/88) in power required. Say that 3.4% of power would have been operating in a regime that had 10% higher losses(which would be insane)- that's only .34% in cascading savings. 3.74% total. That decrease will be very, very easily overwhelmed if the motor requires higher current or is otherwise less ideal for the drivetrain. Resistive losses alone mean that if the current is 1.85% higher, it will be a net loss.
Or another motor. Or a motor optimized for high torque (lots of pole pairs) and another one for high speed (two pole pairs as you can hardly do 360° with a single pair). The issue is usually operating at high speeds, as electrical motors do develop high torque. Even a bus needs to operate with flux weakening.
The motor in the article seems to combine a classical cylindrical design with a planar design (poles places on a disc).
I think the place where automotive and electric engines make the biggest leaps in the coming 20 years is in batteries. smaller and better batteries allows bigger and better motors.
Better batteries allow lighter cars which allow smaller motors. It's pretty ridiculous to move a three ton object in order to move a single human, if you think about it.
No absolute figure given, so it feels at least fishy.
I doubt that the current record of 10kw per kilogram is beatable by any significant extend.
This is limited much by limits of material science, and not electromagnetics. Those 10kw/kg motors fully utilise close to like 80% of the flux, so much bigger advancements from geometry change are unlikely.
maybe not in this case, but from a history of machining, motors have made quiet and remarkable strides. original cone lathes for metalworking were driven by steam engines and a PTO driveshaft. aside from being ridiculously dangerous to operate, they had inconsistent results for tight tolerances. It wasnt unheard of for watchmakers to also find themselves as lathemakers in the early 20th century. Motor speed from PTO was largely not variable.
During WWII motor speed was controlled with a clutch and transmission system, which arguably allowed for the type of finesse and control you need to run a shaper for a large tank engine, or a mill for certain explosives of the nuclear persuasion. older machinists handbooks will still reference your 'gear' when making a cut as a feed rate suggestion. old shapers still have a gearbox and shifter.
along comes the VSM and its a game changer. The variable motor speed can control RPM maximum down to almost zero RPM. In the early 20th century, this simply was not possible. Previously if you wanted to change speed you had to park/reset the lathe and dial your tolerances back in. The way around gear speed change time was to intentionally oversize the part and take it to an automatic filer, but this wears down files and is only an option for certain manufacturers that care about the end product more than the tool wear (WWII again)
What they describe I'm pretty sure I read about something very similar to this in the 90s, and as far as I can tell, never took off; either I am right, and I indeed read about this before, or the article is describing it badly.
PR statement via CNET as the source isn't helping, either.
They might be referring to something like Chorus Motors[0].
I don't know anything about electric motors, but Chorus has been around since the 90s and make similar sounding claims.
I'll quote their technology summary[0]
"The Chorus Star concept utilizes concentrated, high phase order windings which allows the beneficial use of harmonics (temporal, spatial, and overload). Consequently, a Chorus machine can achieve much higher torque densities than a traditional 3 phase motor, but with no cost penalty. Chorus Star machines are superior to three-phase machines as well as permanent-magnet machines".
They make (or are trying to make) a nose-gear mounted assembly for airplanes so you can drive a 737 around with just the APU running - not using the main engines[1]. Also they let pilots pull back from the gate without waiting for a tug on the ground. The claim is that their motor allows them to fit enough torque into the nose wheel to do the job, whereas a conventional motor couldn't do it.
No, doesn't look like. Halbach arrays use magnets in different directions to smoothly redirect a field; you can do the same thing with iron or soft steel. Since the field on the back side of the magnets is basically static it doesnt cost any efficiency and its much cheaper. Halbach arrays are sometimes used in motors that need to be very light, like very specialty high-acceleration brushless motors.
Relative permeability is the characteristic of electrical steels that lets them carry magnetic fields. M19 steel has a permeablity ~8500x higher than vacuum[1].
Permittivity is the characteristic that allows dielectrics to transmit electrical fields. The vast majority of dielectrics are <100x higher than vacuum permittivity, and they're very unsuitable to make a motor out of. Materials with high permittivity have fairly low breakdown voltages. Also, humans have very low breakdown voltages; high voltage motors are often dangerous to be around.
Fundamentally it's because materials lend themselves much better to magnetics.
There are electrostatic motors, it's just that they aren't particularly interesting (low power density, very high drive voltages, poor efficiency). They do have one interesting property, which is that at zero speed they can develop nominal torque without using any power (unlike say a synchronous servo).
It's mostly Coulomb's law; electrostatic force is proportional to the involved charges divided by their separation. You don't have that problem in electromagnetic motors because strong magnetic fields don't break down the rotor/stator air gap. You might turn the air gap into a dielectric oil gap, but now you have fluid friction losses which again limit how narrow that gap can be.
You'll note that this is a recurring pattern with electromagnetic vs. electrostatic implementations of roughly the same idea.
like... an inductor? Inductors and capacitors are opposite in behavior, but a series capacitor can be replaced with a parallel inductor and vice versa. In that sense they are counterparts.
It is not possible to make an inductor out of purely passive capacitive components, or vice versa. In fact the Gyrator[1] is a transistor circuit that exists specifically to act like an large inductor using capacitors, which are cheaper to build at large values. The function of a Gyrator inherently requires active power input; it isn't possible to passively convert the phase lag of a magnetic circuit into the phase lead of a capacitive circuit.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
I want to believe.
But way too many keyword drops. Disruptive is what red flagged me the most.
Way too many promises.
Only lab results and "experts" commenting that it should work in theory.
But no prototype?
Even though it's a different motor they don't "believe" it's going to cost more to make than traditional motors?
Only 3d renders?
I think there was a medical company that did something similar with blood testing. Didn't really work out for them.